3d edge detection point cloud
The SDN-enabled MX960 Universal Routing Platform is a high performance carrier-grade multiservice edge platform with unprecedented scale for service provider and cloud applications. Point cloud datasets are typically collected using LiDAR sensors light detection and ranging an optical remote-sensing technique that uses laser light to densely sample the surface of the earth producing highly accurate x y and z measurements.

Visualization Of The 3d Map As A Point Cloud With Ros And Rviz Download Scientific Diagram
Provided an L 0 minimization method which is directly used to denoise point cloud by applying a similar L 0 optimization procedure to estimate normals followed by repositioning points along the normal.
. Akin to 2D recognition this technique relies on finding good keypoints characteristic points in the cloud and matching them to a set of previously saved ones. We would like to show you a description here but the site wont allow us. For more recent papers please visit awesome-point-cloud-analysis-2020-Recent papers from.
Yin Zhou Oncel Tuzel - Apple Inc. It is time to learn the basics of one of the most interesting applications of point cloud processing. As shown in Figure 2 the overall architecture of our method contains three com-ponents.
Practically this represents the simplest shape that can select a region in space. But in this article we shall discuss the VoxelNet a 3D object detection algorithm that has outperformed all of the above mentioned state-of-the-art models. 3D point cloud samples owing to the irregular structure of point clouds manually annotating such large-scale 3D point cloud datasets is laborious.
The most common approach for moving objects is to utilize a lower data level than the conventional radar point cloud eg range-azimuth range-Doppler or azimuth-Doppler spectra 3746 or even 3D areas from the radar data cube. Deploy the anomaly detection service where you need itin the cloud or at the intelligent edge. Self-supervised learning is one of the predominant approaches to address this issue and is proven to be effective in 2D domain 571334.
But 3D has several advantages over 2D. Namely we will be. These shapes have simple tests that we can use to determine which vertex edge or face is closest to the origin.
For example in 2D a triangle is the simplest shape that can select an area containing a specific point. Depending on which feature is closest. Learn about sustainable trusted cloud infrastructure with more regions than any other provider.
Secure Access Service Edge SASE is an enterprise networking and security category introduced by GartnerSASE converges SD-WAN and Security Service Edge SSE functions including FWaaS CASB DLP SWG and ZTNA into a unified cloud-native service. The advantage of these methods is that the dense 2D or 3D tensors have a format similar to images. With SASE enterprises can eliminate the effort and costs required to maintain complex and fragmented.
These measurements of points once post-processed and spatially organized are referred to as a Point cloud and are typically. Several works have explored self-supervised representa-. Edge detection includes a variety of mathematical methods that aim at identifying edges curves in a digital image at which the image brightness changes sharply or more formally has discontinuitiesThe same problem of finding discontinuities in one-dimensional signals is known as step detection and the problem of finding signal discontinuities over time is known as change.
Discover secure future-ready cloud solutionson-premises hybrid multicloud or at the edge. For anyone who wants to do research about 3D point cloud. The 3D point cloud a new.
Therefore they can be. Build your business case for the cloud with key financial and technical guidance from Azure. It is named after Irwin Sobel and Gary Feldman colleagues at the Stanford Artificial Intelligence Laboratory SAIL.
The MX960 enables inline MACsec support without performance penalties on 10 40 GbE and 100 GbE and delivers 12 Tbps of system capacity in a 12 slot chassis supporting dense 100 GbE. End-to-end learning for point cloud-based 3D object detection. PDF of the paper can be downloaded from here Date of publishing.
Get helpful resources to learn how to build AI solutions in 30 days. Powerful inference engine assesses your time-series dataset and automatically selects the right anomaly detection algorithm to maximize accuracy for your scenario. Point-GNN for 3D Object Detection in a Point Cloud In this section we describe the proposed approach to de-tect 3D objects from a point cloud.
The Sobel operator sometimes called the SobelFeldman operator or Sobel filter is used in image processing and computer vision particularly within edge detection algorithms where it creates an image emphasising edges. Points on an edge are sometimes not faithfully recovered. Sobel and Feldman presented the idea.
Meanwhile since L 0 is a sparser solution than L 1 Sun et al. A graph construction b a GNN of T iterations 1712.

3d Point Cloud Annotation For Lidar Radar Sama

Construct Voxel Grid On 3d Point Cloud Download Scientific Diagram

Use Ground Truth To Label 3d Point Clouds Amazon Sagemaker

3d Point Cloud Annotation For Lidar Radar Sama
Digitizing Reality Automated 3d Point Cloud Data Processing Using Ai Gim International
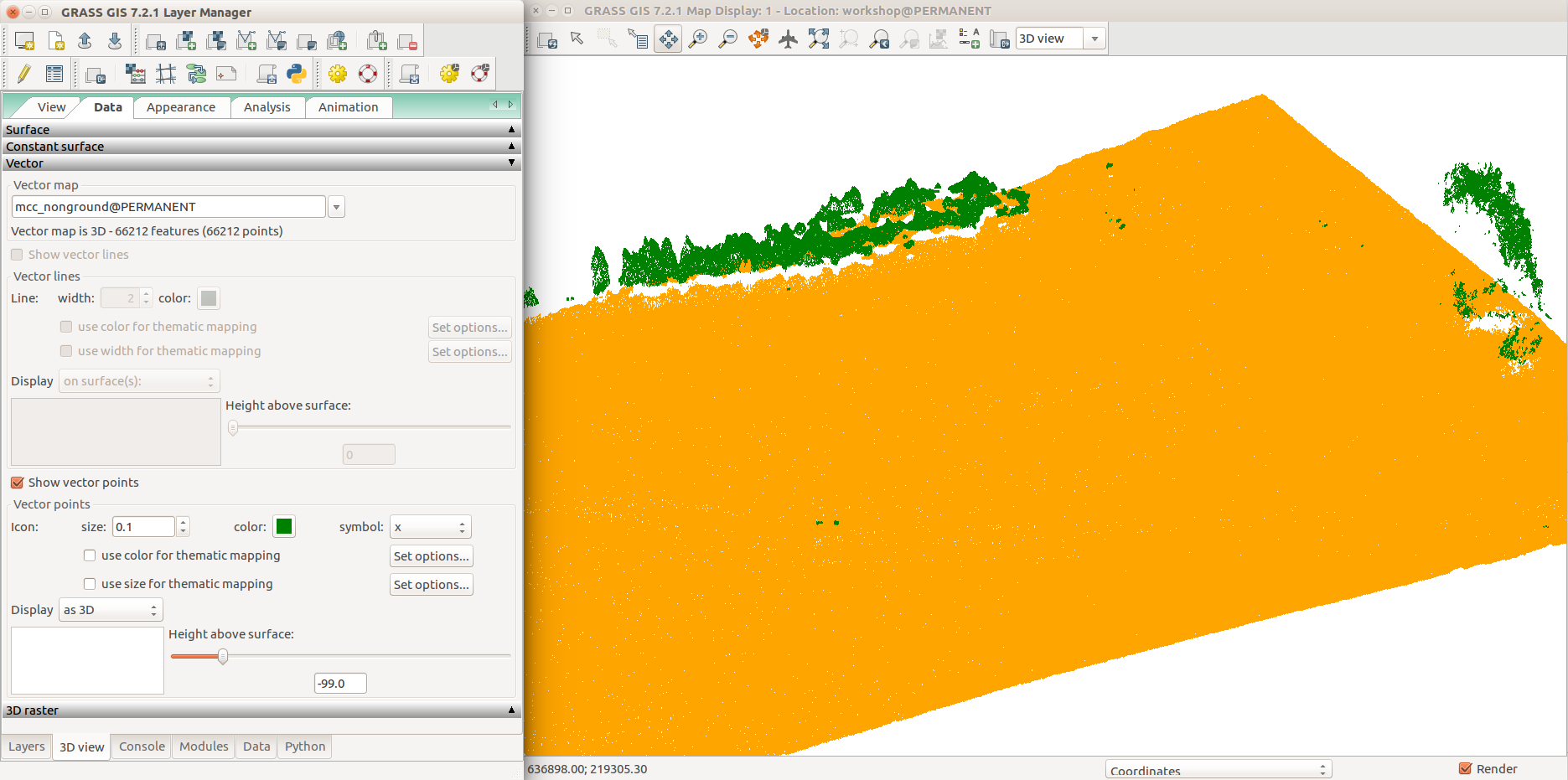
Processing Lidar And Uav Point Clouds In Grass Gis Workshop At Foss4g Boston 2017 Grass Wiki

Building A Lidar To Optical Flow Dataset Given A 3d Point Cloud From A Download Scientific Diagram

3d Point Cloud From Laser Scanning Aligned With Virtual City Model Fig Download Scientific Diagram

3d Point Cloud Annotation For Lidar Radar Sama

How To Use Pointnet For 3d Computer Vision In An Industrial Context By Nour Islam Mokhtari Towards Data Science

3d Point Cloud Of Riparian Vegetation Produced From Terrestrial Laser Scanner Modern Warfare Spatial Analysis Remote Sensing

Novel Algorithms For 3d Surface Point Cloud Boundary Detection And Edge Reconstruction Sciencedirect
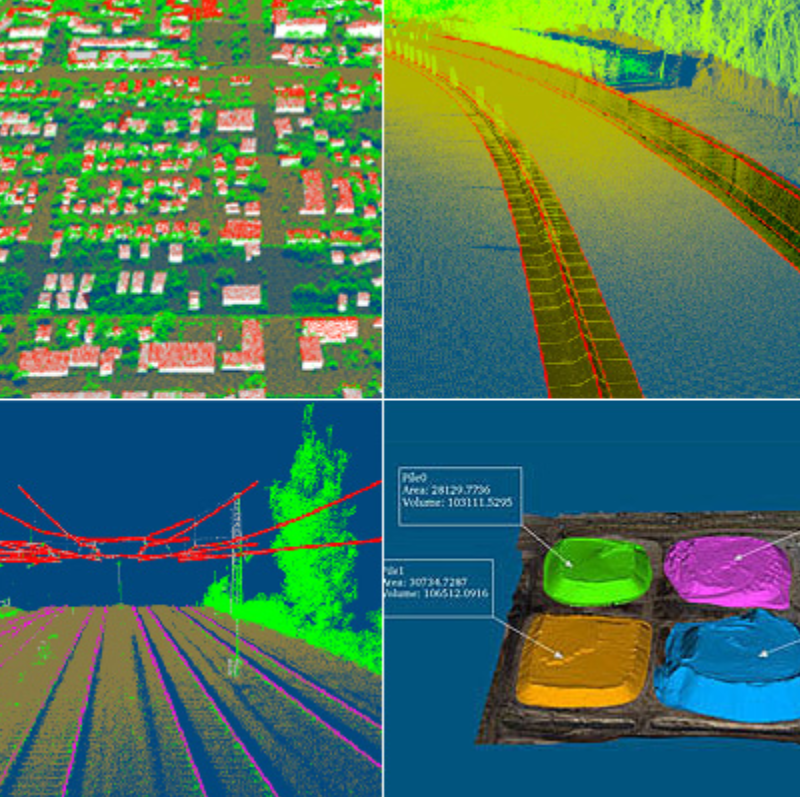
Vrmesh Vrmesh Geo Matching Com
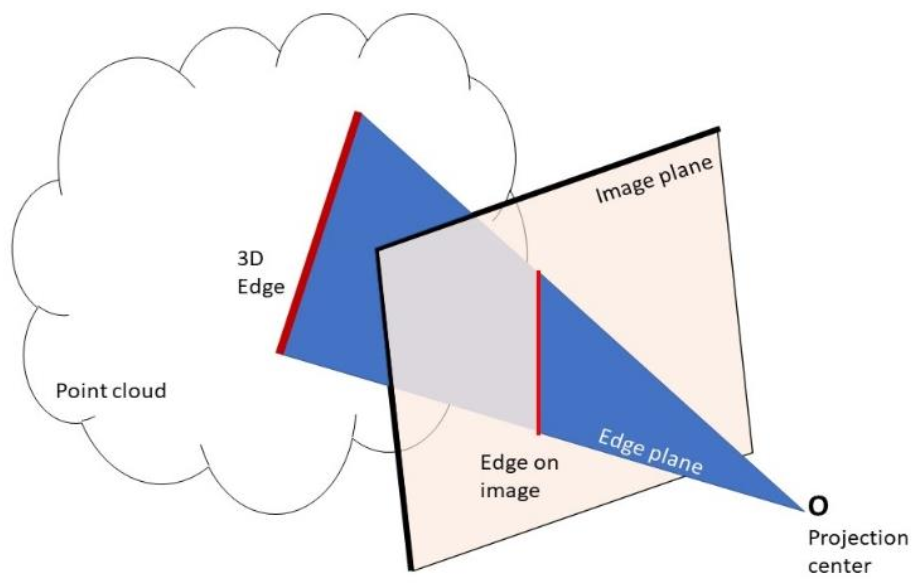
Ijgi Free Full Text Edge Detection In 3d Point Clouds Using Digital Images Html
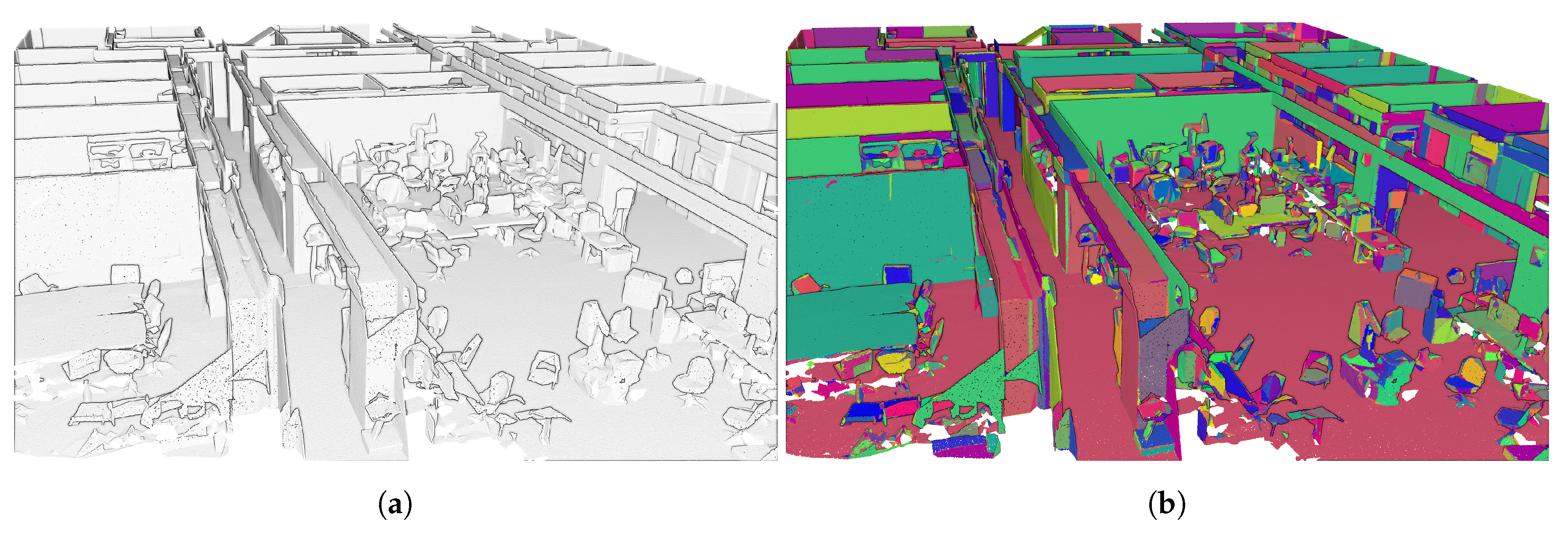
Remote Sensing Free Full Text Point Cloud Vs Mesh Features For Building Interior Classification Html

Lidar Point Cloud Based 3d Object Detection Implementation With Colab Part 1 Of 2 In 2022 Point Cloud Cloud Data Cloud Based

3d Point Cloud Classification Papers With Code
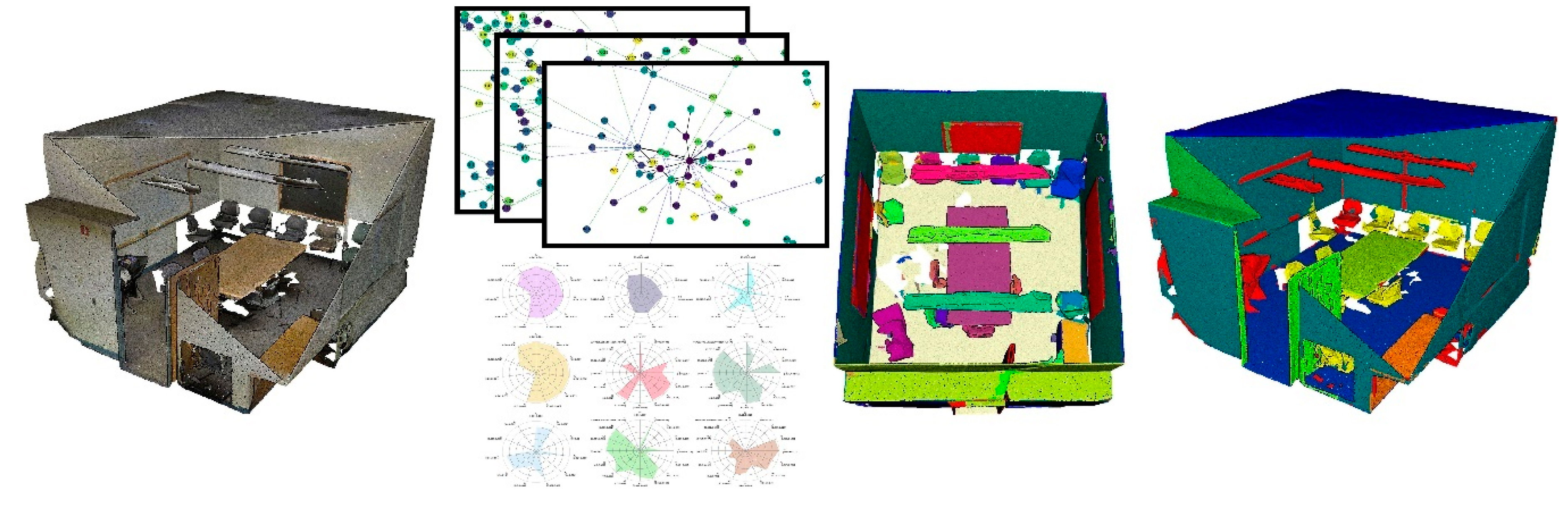
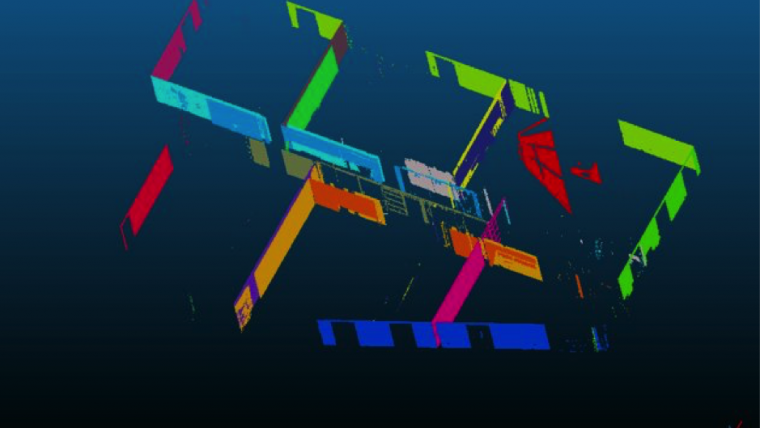
Ijgi Free Full Text Voxel Based 3d Point Cloud Semantic Segmentation Unsupervised Geometric And Relationship Featuring Vs Deep Learning Methods Html

3d Point Cloud Annotation For Lidar Radar Sama